Chapter2 例1(減衰振動と強制振動)
2.1 減衰振動
振動という現象の最も基本となる1次元調和振動子の運動方程式は,
でした.右辺の力は復元力です.ここで,速さに比例する抵抗力が働く場合を考えます.便宜上,比例定数は ![]() とおきます.このとき,振動はだんだん減衰していき,最後には止まることになります.このような振動を,減衰振動といいます.運動方程式は,
とおきます.このとき,振動はだんだん減衰していき,最後には止まることになります.このような振動を,減衰振動といいます.運動方程式は,
すなわち,
となります.(2.1)式の微分方程式の解法として,複素数を使った方法を採用します.複素数の微分方程式を解き,その解の実数部がもとの方程式の解になります.すなわち,

という(2.1)式と同形の複素数 ![]() についての微分方程式(2.2)式を解き,その解の実数部がもとの(2.1)式の解になります.ただし,
についての微分方程式(2.2)式を解き,その解の実数部がもとの(2.1)式の解になります.ただし,![]() と
と ![]() は実数で,
は実数で,![]() が実数部,
が実数部,![]() が虚数部です.ここで,
が虚数部です.ここで,
とおいてみます.このとき,![]() も
も ![]() も複素数です.(2.2)式は次のように変形されます.
も複素数です.(2.2)式は次のように変形されます.
したがって,
となります.(2.3)式について,3つの場合を考え,解を求めます.
まず,
の場合を考えます.つまり,復元力に対して抵抗力が比較的小さい場合です.このとき,
とおくと,(2.3)式は,
となります.したがって,
となります.ただし,
![]() は実数です.
は実数です.![]() の実数部をとって,(2.1)式の解は,(
の実数部をとって,(2.1)式の解は,(
![]() とおいて,)
とおいて,)
です.ただし,![]() は実定数です.さらに変形して,
は実定数です.さらに変形して,
となります.ただし,
 |
です.よって,![]() を実定数として,解は,
を実定数として,解は,
となります.振動しながら指数関数的に減衰することがわかります.
次に,
の場合を考えます.つまり,復元力に対して抵抗力が比較的大きい場合です.このとき,
とおくと,複素数の解は,
です.複素数
![]() の実数部を
の実数部を
![]() とおいて,
とおいて,
が解になります.どちらの項も振動せずに指数関数的に減衰しますが,これを過減衰の状態といいます.
最後に,
の場合を考えます.このとき,解は,
ですが,2階の線形微分方程式を取り扱っているので,このままでは一般解にはできません.そこで,
とおいて,(2.2)式に代入して計算します.ここで,
 |
||
 |
なので,
 |
||
 |
||
 |
||
となります.ただし,![]() と
と ![]() は積分定数です.したがって,(2.2)式の一般解は,
は積分定数です.したがって,(2.2)式の一般解は,
となります.定数 ![]() と
と ![]() の実数部を,改めて
の実数部を,改めて ![]() と
と ![]() とおくと,(2.1)式の解は,
とおくと,(2.1)式の解は,
です.この場合も指数関数的に減衰します.この状態を臨界減衰といいます.
2.2 強制振動
角振動数
![]() の1次元調和振動子に角振動数
の1次元調和振動子に角振動数
![]() の周期的な外力,
の周期的な外力,
が働く場合を考えましょう.このような状況の振動を強制振動といいます.運動方程式は次のようになります.
少し変形して,次のようになります.
(2.4)式は2階の線形微分方程式です.これを線形微分方程式の一般論にしたがって解きます.まず,右辺を 0 とおいた同次方程式は,調和振動子の微分方程式そのものですので,その解は,
です.次に,(2.4)式の特解を求めます.特解としては外力と同じ周期の振動が予想されるので,
とおいて,(2.4)式に代入して計算します.
 |
||
 |
||
 |
||
 |
故に,一般解は同次方程式の解と特解の和なので,

と求められます.この解の第1項は,外力が作用していないときの調和振動を表しています.第2項は外力の影響を示していますが,
の場合,振幅は無限大になります.このような状態を共鳴または共振といいます.
強制振動の問題を,複素数を使った方法で解いてみましょう.周期的な外力として,
を加え,複素数の微分方程式を考えます.
変形して,
![]() の実数部が解なので,実質的には外力として,
の実数部が解なので,実質的には外力として,
を加えていることになります.この外力は上の議論におけるものと一致しています.(2.5)式の特解を求めるために,![]() を複素数の定数として,
を複素数の定数として,
とおき,微分方程式に代入して計算します.
 |
||
 |
||
 |
![]() が求められましたが,これは実数であることがわかりました.故に,
が求められましたが,これは実数であることがわかりました.故に,![]() は,
は,
 |
||
 |
ですので,実数部をとって特解
![]() は,
は,
となります.この特解は上の議論での余弦関数のものに一致しています.
2.3 抵抗力のある場合の強制振動
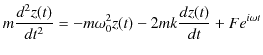
"減衰振動" のSectionのように,速さに比例する抵抗力を受けると同時に,"強制振動" のSectionのような外力が働く場合を考えましょう.このとき,運動方程式は次のようになります.

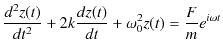
これを変形して,
となります.(2.6)式を線形微分方程式の一般論にしたがって解きます.まず,右辺を 0 とおいた同次方程式については,"減衰振動" のSectionで取り扱った通りです.次に,(2.6)式の特解を求めます.解としては,外力と同じ周期の振動が予想されるので,特解を,
とおいて,(2.6)式に代入して計算します.
 |
||
 |
||
 |
故に,

(2.7)式において,![]() とおいた式と,(2.7)式を
とおいた式と,(2.7)式を ![]() で微分して
で微分して ![]() とおいた式より,
とおいた式より,
です.ここで,(2.8)×![]() +(2.9)×
+(2.9)×
![]() より,
より,
 |
||
 |
となります.また,(2.8)×
![]() -(2.9)×
-(2.9)×![]() より,
より,
 |
||
 |
となります.故に,![]() が以下のように求められます.
が以下のように求められます.
 |
||
 |
||
 |
![]() も次のように計算できます.
も次のように計算できます.
 |
||
 |
特解を求めるのに,複素数を使った方法で解いてみましょう.微分方程式,
を変形して,
の実数部が求める特解になります.![]() を複素数の定数として,
を複素数の定数として,
とおき,微分方程式(2.10)式に代入して計算します.
 |
||
 |
||
 |
ここで,
|
とおきます.
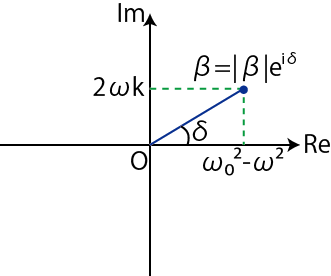
Figure2.1: ガウス平面
このとき,
 |
です.さらに,

とおくと,
となります.実数部をとって,特解
![]() は,
は,
となります.この特解は,上の議論での余弦関数のものに一致しています.